JSR's automatizarea procesului de manipulare robotizată cu YASKAWA Robotul de manipulare este aplicat la manipularea și despachetarea pungilor de particule de plastic, este aoperațiune de manipulare precisă, fiabilă și durabilă, contribuind cu valoare la promovarea automatizării producției.
Indiferent de aspectele legate de mașini, agricultură, îmbrăcăminte, construcții sau viața de zi cu zi, putem vedea figura particulelor de plastic reciclate. După ambalare, aceste particule trebuie manipulate manual, ceea ce reprezintă o muncă intermitentă cu costuri ridicate și intensitate ridicată a muncii. Timpul de lucru anterior al clientului a fost de 8 ore, iar fiecare sac de materiale a fost de 25Kg. Eficiența manuală este de 2 saci pe minut, iar 960 de saci pot fi demontați într-o zi. Timpul de lucru după manipularea și dezasamblarea robotului este de 24 de ore, care poate fi operat continuu, iar eficiența este de 3 saci pe minut, iar 4320 de saci pot fi demontați într-o zi.
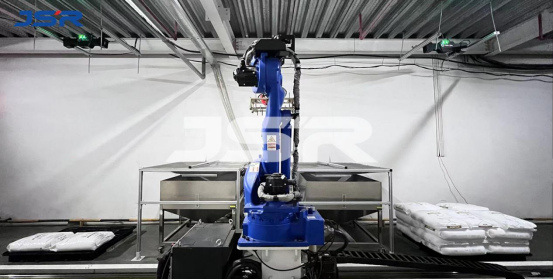
Soluțiile implementate de Jieshing pentru clienți: robot de manipulare Yaskawa GP180, șină de sol lungă de 7,5 m, coș pentru materiale, suport pentru materiale, sarcină maximă GP180 180 kg, deschidere maximă a brațului 2702 mm. Călătoria efectivă a orbitei terestre de 7,5 m este de 6 m, viteza de mișcare este de 0,7 m/s. Sistem de golire de identificare vizuală 3D. Sistem de golire de identificare vizuală 3D, cameră cu funcție de învățare, prin achiziția timpurie a datelor materiale și modelarea ulterioară a materialelor, astfel încât rata de succes a recunoașterii camerei să fie de 99,9%.
Producția automată îmbunătățește foarte mult eficiența muncii, capacitatea de producție stabilă, livrarea precisă, siguranța ridicată, utilizarea rezonabilă a zonei existente, îmbunătățește imaginea corporativă și curățenia atelierului, pentru a obține producție fără echipaj.
Ora postării: 26-sept-2022
